
Ikelite DS160/161 閃光燈電池倉的開啟與扣具的清潔,很實用,用160/161在沙地拍過微距都懂的
Ikelite DS160/161 閃光燈電池倉的開啟與扣具的清潔,很實用,用160/161在沙地拍過微距都懂的
翻譯的過程中會遇到詞彙用語管理上的問題:
1.詞彙前後不統一
2.不同專業領域,用的術語不一樣,如何確保翻譯後詞彙符合專業用語?
3.有些詞彙不用翻譯,例如公司名稱的英文縮寫
這些問題其實都可以用 memoQ 來解決。
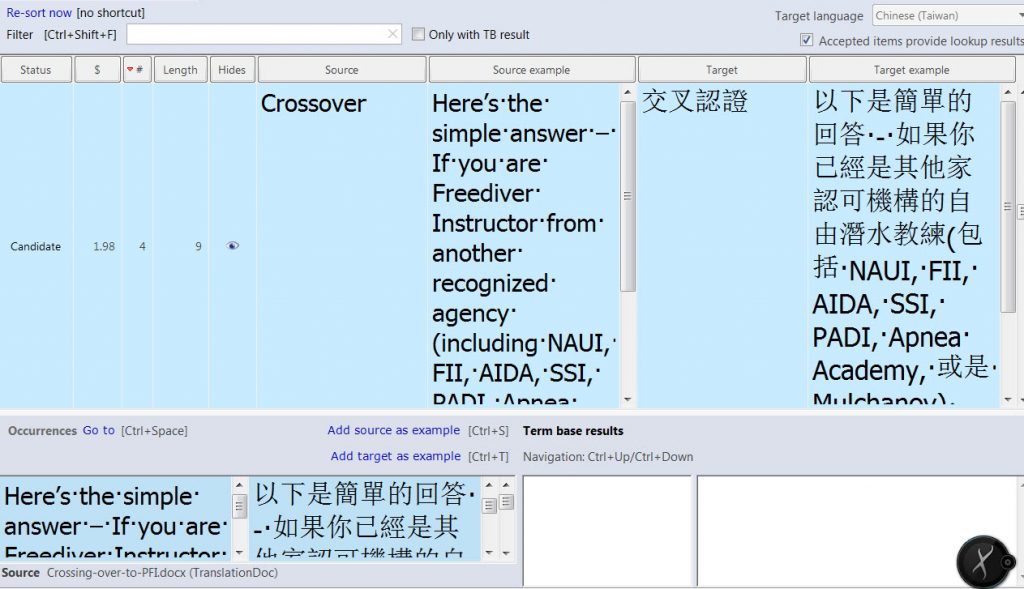
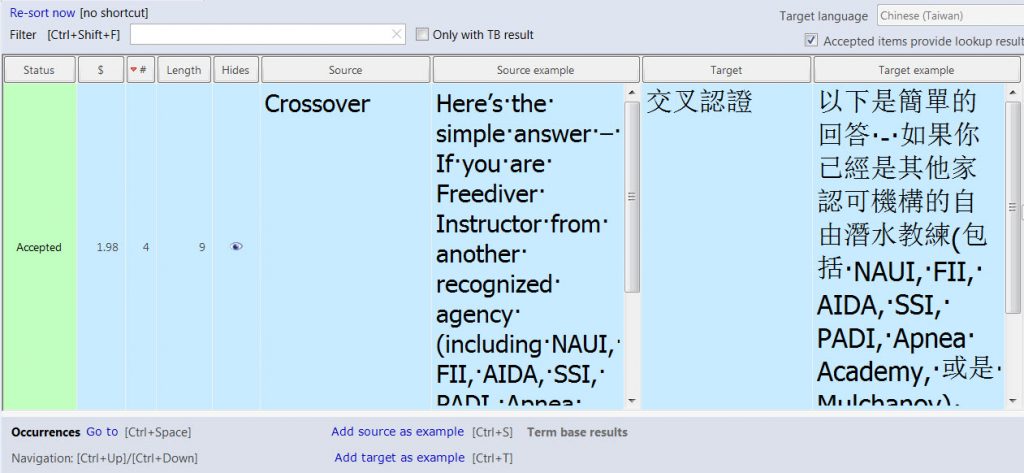
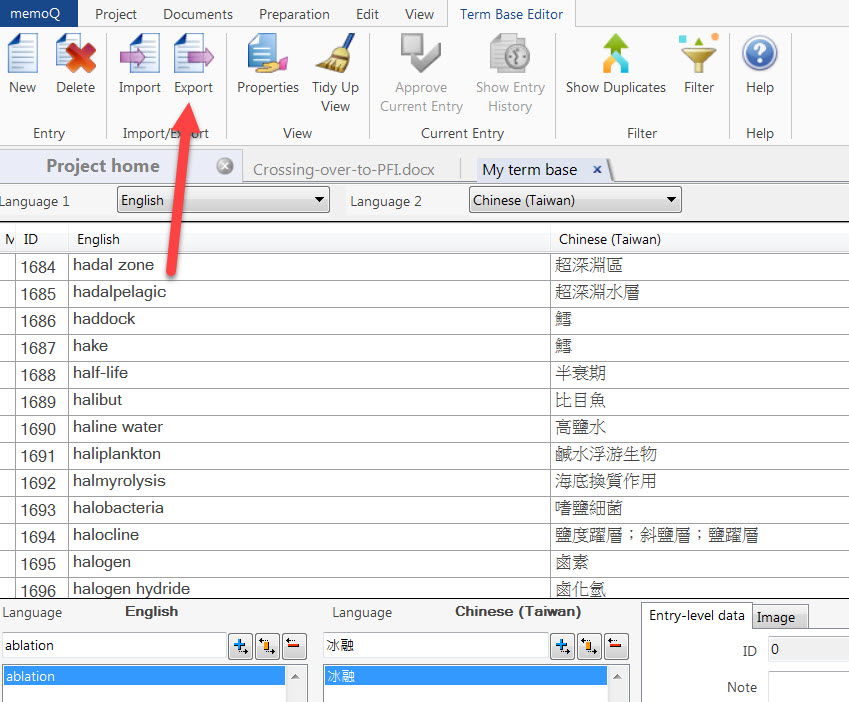
Extract Terms – 擷取出詞彙
先利用此功能讓系統判斷可能是詞彙的詞語,這樣的話就可以在翻譯之前先把這些詞彙定下來,先減少一部分用語不統一的程度。然後也可以找出範例用句,附加成為該用語的範例,這樣有助於之後翻譯參考。記得要將詞彙的狀態從Candidate改成Accepted,這樣才會正式加入詞彙庫。
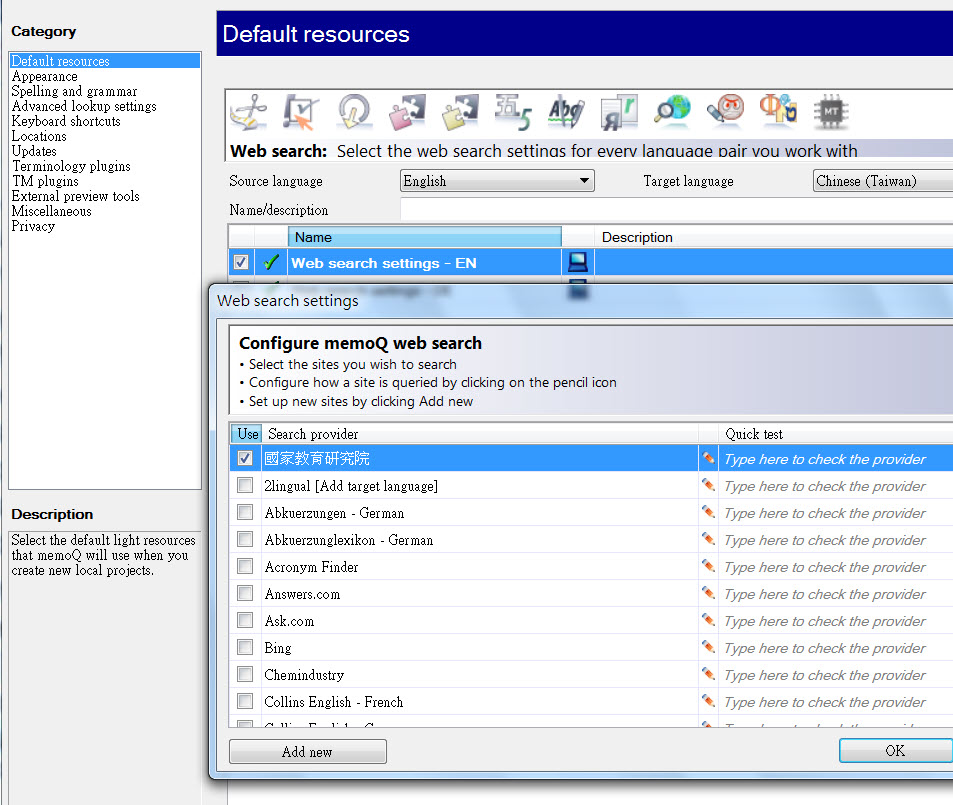
利用網路資源查找術語
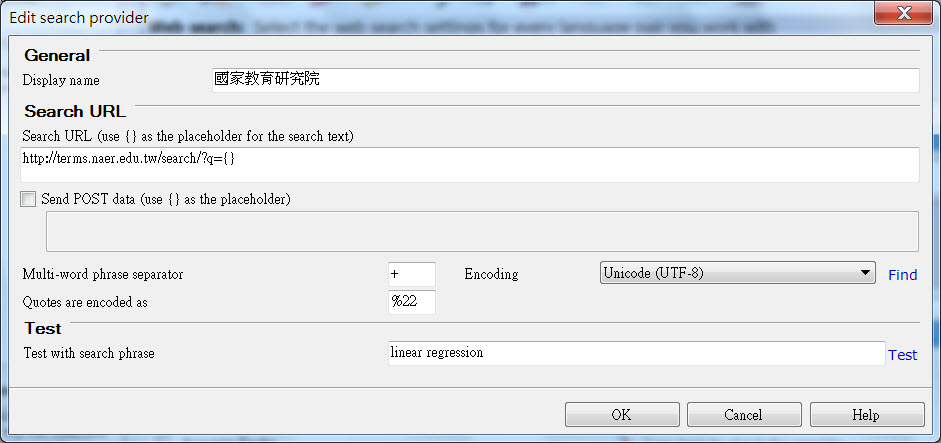
遇到不懂的詞語,除了另外開瀏覽器或是利用字典程式查詢,最快的方式其實是設定好要查找的網路資源並且利用 memoQ 的快速鍵 Ctrl+F3 來快速查詢。舉個例子,例如我可以設定查找時用Google和國家教育研究院的資料庫,Google在memoQ已經有設定好,可以直接加,但國家院的則需要自己手動加進去。設定好以後只要將詞彙反白按Ctrl+F3就能快速查找網路字典或搜索引擎資料,並且可以用分頁切換來瀏覽比較查找的結果。

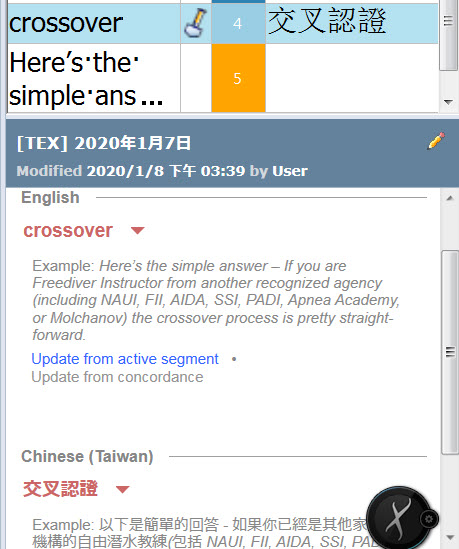
手動加進詞彙和設定不翻譯的詞彙
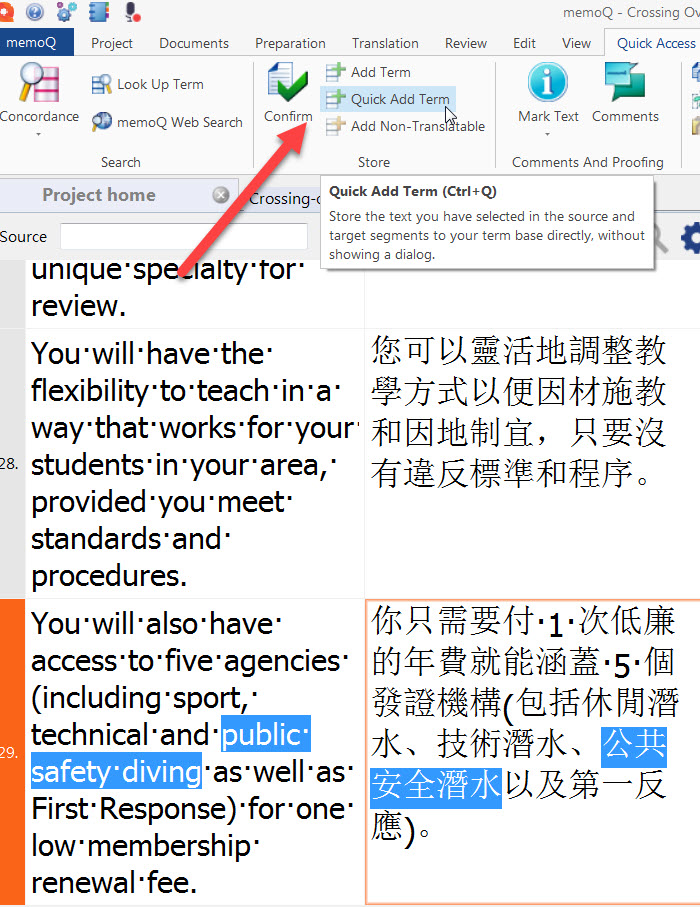
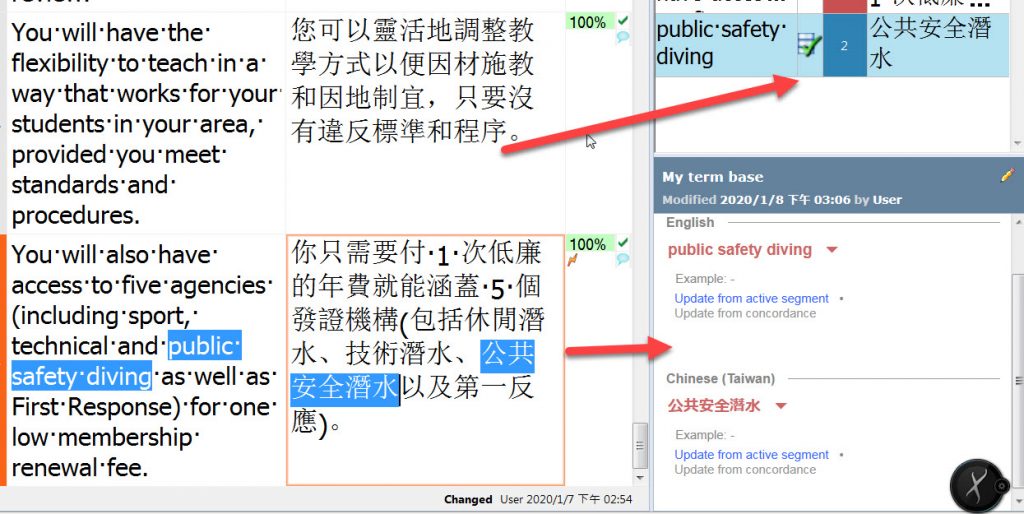
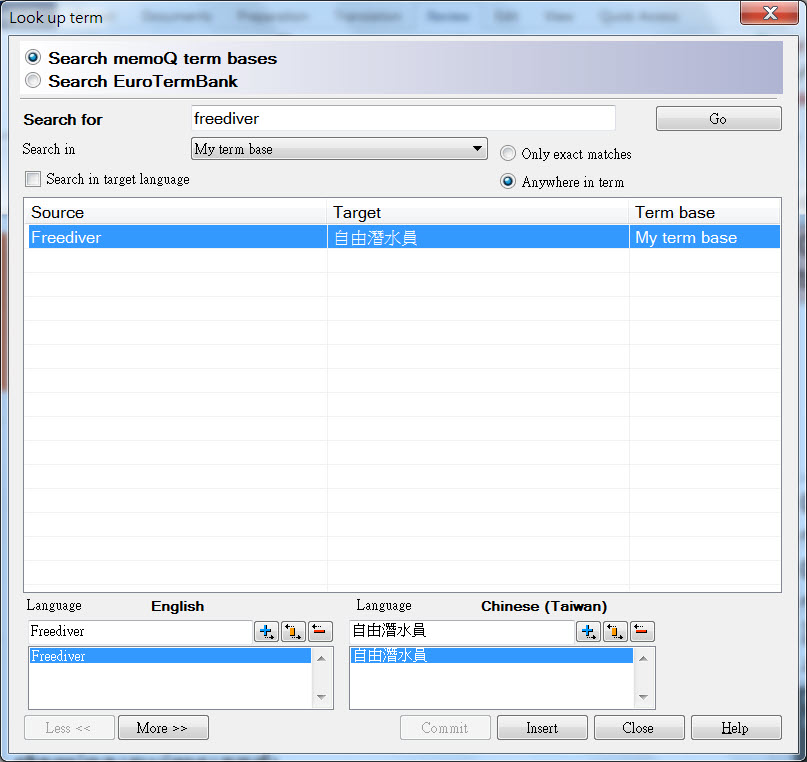
翻譯過程中還會繼續發現新的詞彙,這需要自己翻譯好後標示起來後用 Quick Add Term 功能告訴 memoQ。同時若遇到不需要翻譯的詞彙,也可以用 Add Non-Translatable 功能告訴 memoQ。之後也可以利用 Ctrl+P 的快速鍵來查找辭庫中的詞彙。
詞彙庫的管理
詞彙庫可以在進行編輯,例如找出重複的,然後刪除編輯都可以進行,也可以匯出到檔案,例如做為課本後面的詞彙對照表來用,或是之後的翻譯專案可以再利用此詞彙庫。
翻譯文件可以土法煉鋼一個字一個字地在word裡編輯,但若資訊量大且複雜的話,就會遇到很多麻煩的地方,例如:
1.翻譯的品質掌控: 是否有翻譯前後不一致的地方?是否有特殊符號排版跑掉的地方?詞彙是否根據專業的辭典翻譯?
2.翻譯的效率掌控: 遇到不懂的詞彙能否快速查到對應的線上字典?是否有遺漏還沒翻譯的?已經翻譯過的是否可以套用在類似的語句上?
目前 SDI/TDI/EFRI/FRTI/PFI 已經採用 memoQ Web 版的翻譯輔助系統來協助潛水教材和準則的翻譯品質和效率。而memoQ究竟是如何提升翻譯的品質和效率呢? 以下我以 memoQ 9.2.5版本來介紹:
1.詞彙的翻譯:
可以透過即時字典軟體來輔助,或是利用建立好的詞彙對照檔做比對,也可以利用例如 termsoup 這類的網頁版系統來幫助翻譯。如果是 termsoup 的話,可以線上即時查找各種專業字典的翻譯建議,等全部都翻譯好之後,可以將之匯出成翻譯記憶檔,格式選Excel。然後再以MS EXCEL開啟後另存成 CSV 檔,再利用記事本將 CSV 檔轉存成 UTF-8編碼,這樣能避免餵進去memoQ系統時產生亂碼。



2.將翻譯記憶匯入memoQ系統
在memoQ裡建立專案後,可以將要翻譯的檔案,例如word檔匯入專案,接著建立和指定翻譯記憶,然後就可以匯入由termsoup建立的翻譯記憶CSV檔。接著可以進行預翻譯 Pre-Translate,也就是先用翻譯記憶和要翻譯的檔案進行比對,看是否有已經可以套用翻譯記憶的地方,並且給出一個模糊的翻譯結果和告訴你比較的相似度大概有多少。這個時候就可以在繼續從Concordance的欄位去套用更多翻譯,翻譯越多,到最後就會越翻越快,因為已經有很多Concordance可以套用了。也就是說,翻譯記憶會越來用強大和完整。




3.將專業辭庫匯入memoQ系統
專業辭庫可以在很多政府網頁上找到例如國家教育院,下載回來後可以先用Excel編輯,只保留兩欄一欄英文一欄中文的詞語翻譯對照,然後就可以匯入memoQ的 Term Bases。匯入之後可以進行QA品質保證檢查,假如翻譯的詞語跟詞彙檔有出入,QA都可以幫你找出來。



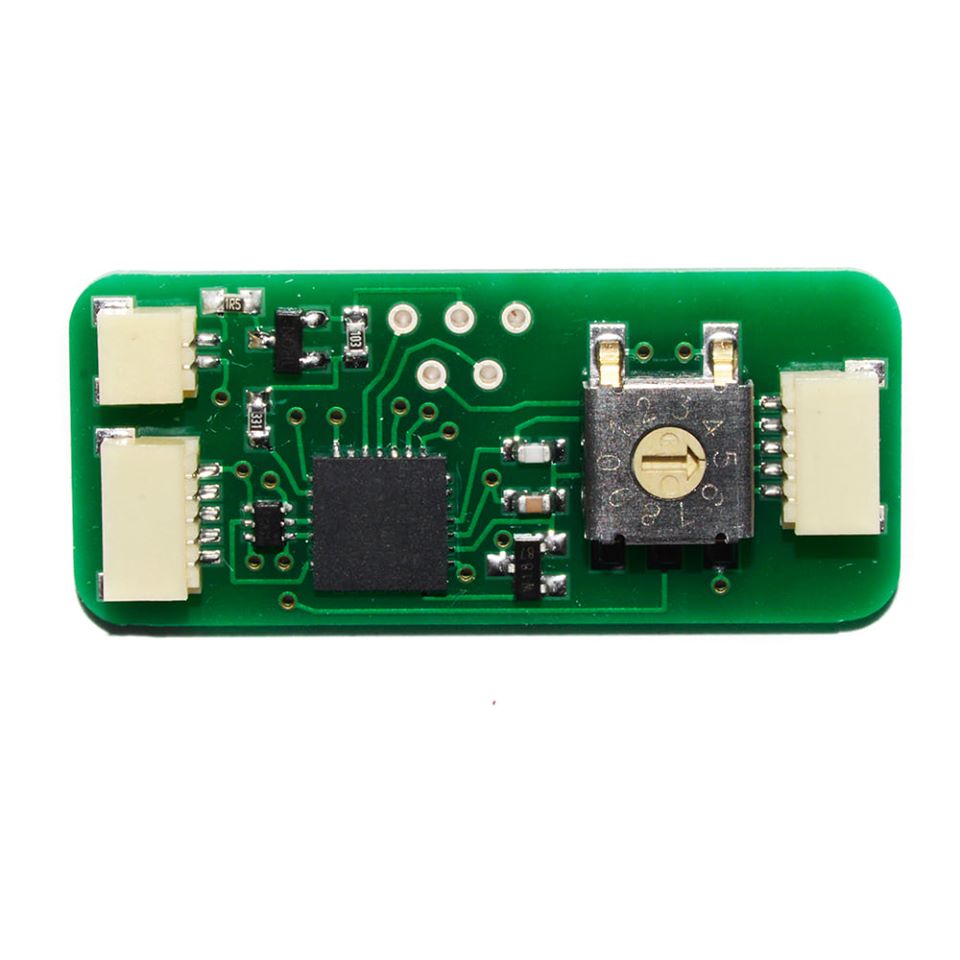
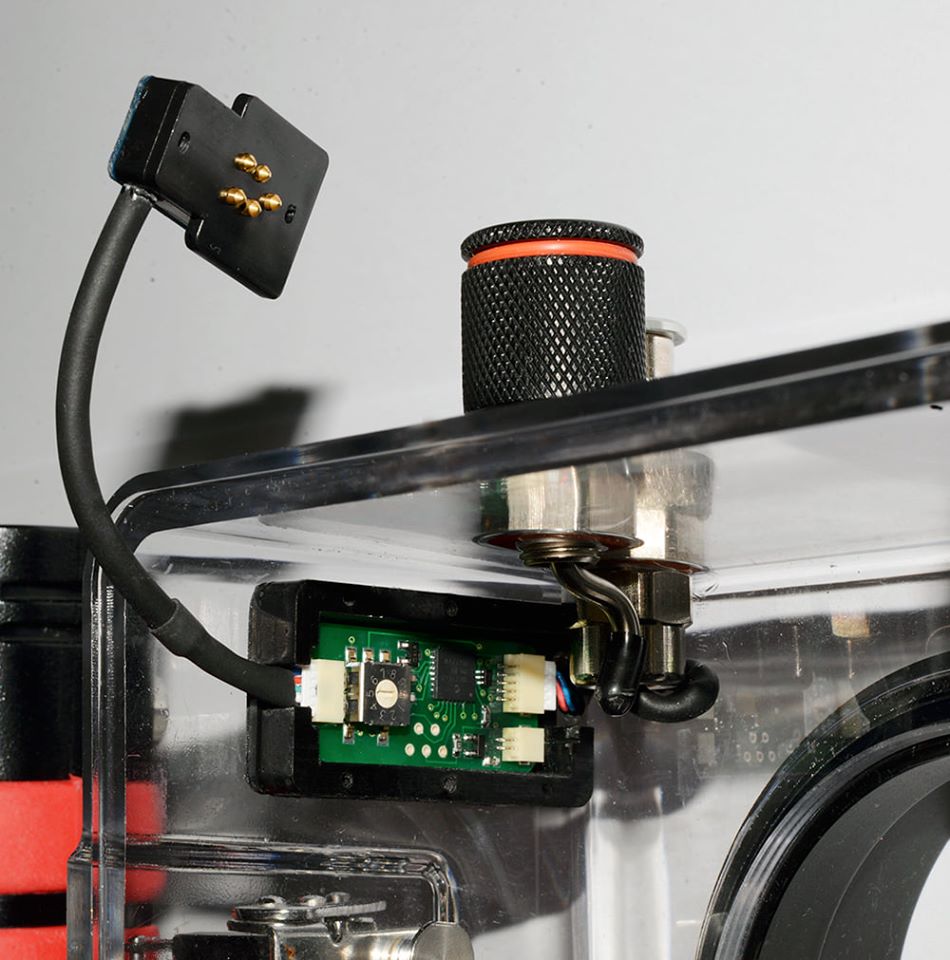
專為Olympus相機用的 Ikelite 防水殼設計的光纖電纜 TTL 信號轉換器正式推出!
產品編號 #16076,可透過單一電路板同時支援光纖和電纜TTL,相容的閃光燈品牌: Inon, Ikelite, Sea&Sea, Subtronic



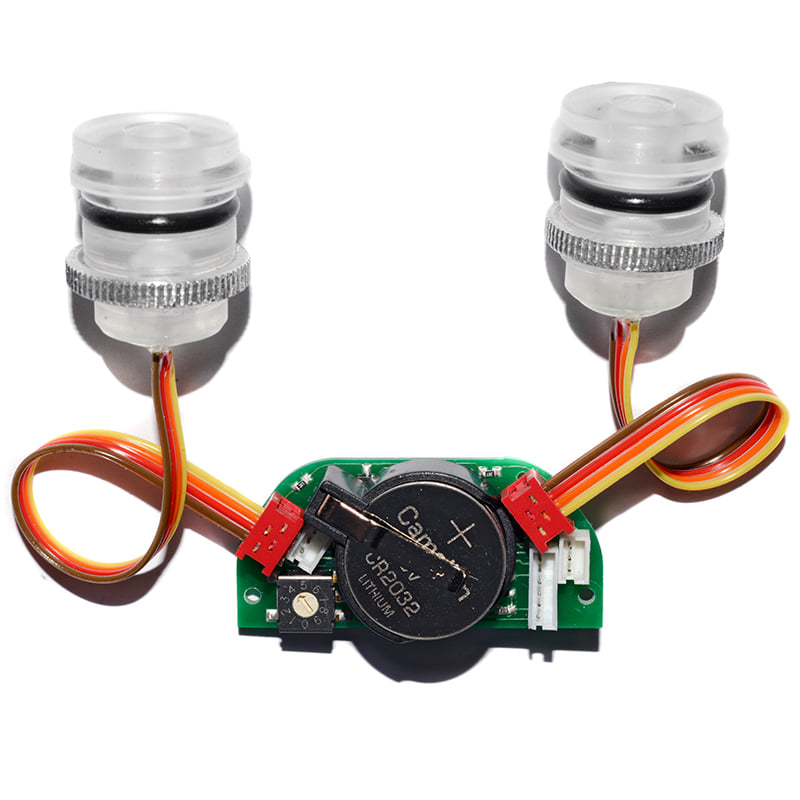

TTL 信號轉換器 for Sea&Sea MDX-5D Mark III 防水殼。支援 2 光纖接頭 + 2 電纜接頭韌體支援 INON, IKELITE, SEA&SEA 和 SUBTRONIC 閃燈 TTL 信號電池壽命長達 3 年
學潛水其實可以培養孩子許多能力,今天來談談對於培養對於演算法、程式語言興趣的可能性。
假如你除了學潛水電腦錶操作,也有學如何用傳統的「規劃表格」來規劃的話,一開始一定覺得很複雜, 可能過了一陣子就忘了怎麼用,然後就從此只會按電腦錶。
其實從程式語言的角度來看,程式=資料+演算法,你只要告訴電腦怎麼去處理資料,以及餵給電腦可以處理的資料,就能夠幫我們演算出結果 規劃表格也不例外,也是有資料的部份和演算法的部份
==
資料型態
表格裡其實只有兩種資料,時間和深度,而深度其實就是長度單位。也就是說,我們潛到海裡,真正能控制的,也只有時間和深度,你可以控制要在多深的地方停多久,僅此而已。但為什麼要做規劃,其實就是要「聰明地」控制時間和深度,減低罹患減壓病的機率。
所以我們想知道的是,例如: 想下多深可以待多久?給深度 -> 查 NDL 想待那麼久最深可以下多深? 給 NDL -> 查深度 下了某深度待某段時間後 -> 回水面休息一陣子 -> 在下某個深度,查NDL 之後想下多深待多久,在水面上必須休息多久?
這些問題的資料都是時間和深度
==
演算法虛擬碼(Pseudo code)
至於怎麼去用這表格,其實可以運用虛擬碼來思考,也就是真正寫程式之前, 先用一種介於白話和電腦程式語言之間的虛擬碼,可以讓意思更簡潔明瞭, 讓我們把重點專注在程式的行為和處理的資料上,等確定虛擬碼符合我們想要的需求, 再根據虛擬碼寫成真正電腦能看懂得程式語言。
所以潛水課本看完之後可以嘗試寫下潛水規劃表格的虛擬碼,看看自己是否理解整個運算過程,也方便日後複習。
==
例外處理(Exception)
有時候某些情況會被歸為例外情況,要特別處理。 例如可能「壓力等級」太大,好比說到XYZ後,就可能得讓SI至少1小時等 這些在表格上會另外註明,使用前必須看清楚。
==
函式(Function)
基本上就是有傳回值的副程式 可以應用在高氧的規劃表格其實我不需要另外為高氧設一個表格,我只要用原本空氣用的規劃表格就好。也就是說,假如我可以算出一個值,這個值也可以丟進去吸空氣用的規劃程式就好那就輕鬆了在高氧的規劃,其實就試算一個EAD,我吸多少濃度的高氧下多深,其實等同於吸空氣下到另一個深度。這個換算的原理是建立在氮分壓,所以只要用高氧其實等於低氮的概念去想,就知道怎麼換算。等我用這個 EAD 函式去算了以後,得到新的深度,再回傳給空氣規劃表格下去計算即可。當然,你也可以不把這個EAD寫成副程式,但你就得為22-40%每一個整數的濃度都做一個表格,當然,最常用的就是 EAN32
==
迭代與遞迴
潛水往往是重複潛水,所以我們有機會持續用到表格好幾次,這其實就是迭代的精神。 又或者是我們想要反推,這也會用到遞迴的精神。 例如我們想要知道潛了第一潛之後,要下第二潛該怎麼繼續為資料給演算法 這時候就會查出一個壓力等級的英文符號,這會告訴我們怎麼繼續算下去。 然後得到新的壓力等級,又繼續算下去….
不過,壓力等級這英文符號不能餵給潛水電腦錶繼續算下去,或是潛水電腦錶也不會算一個壓力等級給你 所以當你電腦錶中途壞了,想要切換成表格繼續來規劃,就得利用「歸零大法」,等到「壓力等級」消失,一切從頭算起就好了。
自動駕駛+切換車道 解釋潛水減壓理論
作者: 丁楓峻 , SDI/TDI 教練#29446
快的半時組織=> 跑車 => 載重少馬力大 => 加速快減速也快
慢的半時組織=> 貨車 => 載重大馬力小 => 加速慢減速也慢
惰性氣體分壓 => 自動定速器設定的上限 => 會跟最高速限成比例
環境壓力 => 當下車道的最高速限 => 不同車道有不同速限 => 快車道速限高,慢車道速限慢有好幾個車道,且車子可以切換車道 => 可以連續地切車道,但是不能跳過某個車道 => 越快的車道就是越深的水深 ,風險也越高 => 最瘋狂的事就是切到超快的車道待一陣子後卻又非常快地切回最慢車道 => 切回慢車道後肯定大幅超速
加速減速有多快 => 成指數增長或衰減 => 0-100km/h 如果要花 5 秒,那麼 100-150km/h 也要花5秒
自動駕駛 => 這兩台車都是自動駕駛,要加速要減速,都是根據定速器與速限的關係去跑的,駕駛員只可以選擇變換快慢車道的時機
車道限速規則(M值):
1. 原定的容忍可超速的最上限,不同車型在不同車道有不同的上限 => 不同半時組織的M值線斜率和截距不同
超速偵測照相機會拍照,但未避免太嚴格執法引起民怨,有設定超速容忍範圍:
1. 速限比較高的車道 => 允許超速的幅度比較大 => 在水深比較深的地方,允許過飽和的程度比較高
2. 速限比較低的車道 => 允許超速的幅度比較小 => 在水深比較淺的地方,允許過飽和的程度比較小
舉個例子說
最高速限100km/h車道,其實可以容忍到 110km/h 還不會被拍照最高速限70km/h車道,可能只能容忍到 65km/h
超速照相機有誤判的可能:
1. 有可能發生超速後卻沒拍照,也有可能發生沒超速卻誤判超速而拍照 => 發生減壓病和超出M值多少的關係
=
有了以上的類比之後,我們實際來設想一下上路後這兩台車的行為
一開始,車子都還在加速,且都還沒達到最高速限,假設先開到車速上限 100km/h 的車道後待著,車子的自動定速器設定速限為 79km/h,就好像吸壓縮空氣一樣,裡面有 79% 的氮氣如果不考慮有沒有足夠燃油,一直開下去,最終兩台車都會達到 79km/h,只是貨車要花比較久而已。
切換到較慢的車道,突然最高速限降為 70km/h,這時候有三種可能:
1.跑車和貨車都沒超速
2.跑車超速但是貨車沒超速
3.跑車和貨車都超速
這三種情況取決於從較快車道切到較慢車道所花的時間和切了多少車道而定
現在比較有趣的問題是,有沒有可能發生跑車沒超速但是貨車卻超速的情況???你可能會直覺地猜測不可能,跑車明明開得比較快,怎麼可能會有跑車超速但是貨車沒超速的情況!!!結果是,有可能!!!
假如跑車和貨車都達到定速器最高速限,這時候進到下一個速限比當下車道自動定速器設定的速限還要低的話,因為貨車減速比較慢,所以可能當跑車已經減速到最高速限以下,貨車還在減速,還沒減到最高速限。
這種情況會不會越來越嚴重? 也就是說有沒有可能到最後兩台車都一直處於超速的情況??有!!只要沿路的最高速限一直往下降,也就是從快車道切到慢車道的速度很快,即使一直被自動定速器踩剎車都還是高於最高速限。
==
超速一定會被拍照罰款嗎? 不一定,剛剛有提到,為了避免民怨,其實有設定速限高的地方可以允許超速多一點,所以有可能超速了,但是慢慢地會被自動定速器降速而沒有被罰款。也有可能超速的幅度太大,這時候還是得執法,所以就會被拍照。當然也有可能你超速很多,卻因為運氣好機器偶發性錯誤沒偵測到,沒有被拍到照但我們不能總是去賭測速照相剛好壞掉吧!
==
我們並不知道沿途哪裡有測速照相機,只能回到家後才知道有沒有收到罰單,有可能超速了但是沒被罰,也有可能沒超速但是照相機誤判,但整體來說還是超速了有被拍到的機率大。
為了害怕超速被罰款,可能會採取幾種策略來設定自動定速器:
策略一 => 調整自動定速器與最高速限的差距 = 吸高氧吸高氧 => 讓自動定速器設定的速度上限小於最高速限,且兩者的差距更大一點假設第一個路段車速上限 100km/h,車子的自動定速器設定速限為 79km/h,現在調成 68k/h就好 => 就像吸21%氧氣和32%氧氣的差異
策略二 => 聰明地切換快慢車道 = 壓差係數 (Gradient Factor)1. 第一次有意識要在較快車道停留的時間點 => 壓差係數最低值 Gradient Factor (Low)2. 切到最後一次的慢車道後要待在該車道的時間 => 壓差係數最高值 Gradient Factor (High)
也就是說,本來可以比較肆無忌憚地切換車道,現在就會有策略地在切換車道後停一下降速,避免又切到較慢車道後超速太多。
==
想一想…….一直都待在慢車道好嗎?一值都待在快車道好嗎?要下交流道前,在慢車道待3min的意義是?
==
在Shearwater Teric上怎麼看?
垂直線藍色 => 自動定速器的速度上限 => 吸入的惰性氣體分壓
綠色 => 該車道的最高速限 => 環境壓力
紅色 => 該車道限速規則原定的容忍可超速的最上限 => M值
16個綠色水平橫條=>16台不同的車的當下的車速 => 最上面是最快的跑車,最下面是最慢的貨車








Ikelite 防水盒 for Olympus OM-D E-M5 Mark III
鏡頭罩對照表 => https://docs.ikelite.com/reference/port-chart-dlm-a-system.pdf

Scubalamp V4K 攝影燈 (7,600 流明) ,演色性指數 (CRI): Ra96。
CRI要達標90以上,一定得用多晶式COB燈珠(看起來像蛋黃),因為電子躍遷物理機制,LED螢光粉需額外混料,才能達到紅色區間發色,也才能提高CRI。而一般單珠式的CRI多在80以下

